


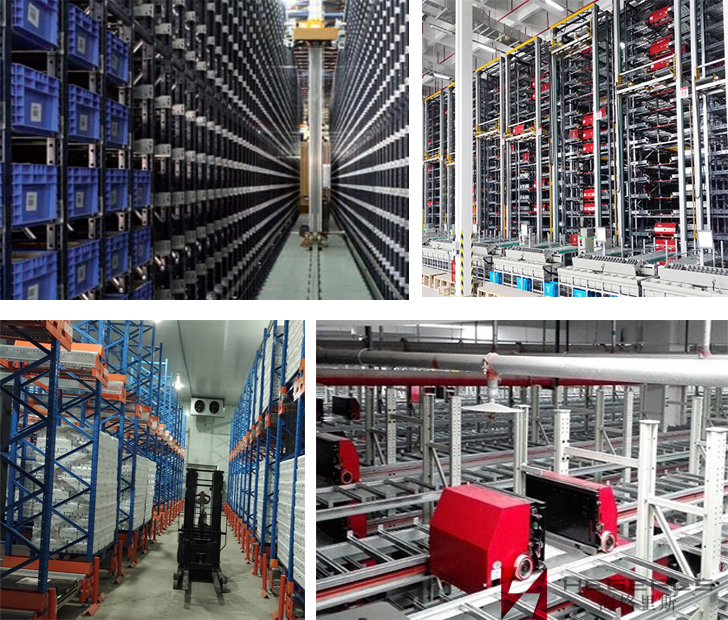
Dina taun-taun ayeuna, kalayan popularitas Internét anu terus-terusan, e-commerce parantos berkembang pesat. Komoditas pesenan konsumén nunjukkeun karakteristik seueur variétas, sababaraha bets sareng jaman pangiriman anu pondok, anu ngajantenkeun dénsitas neundeun rak di pusat distribusi logistik supplier terus ningkat. Frékuénsi bahan asup sareng kaluar tina gudang beuki ningkat. Jumlah bagian leutik picking ngaronjat unggal poé. Beuki loba puseur distribusi logistik ngagunakeun mobil shuttle barang dumasar kana sistem picking jalma.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
Clamping garpu teleskopik anu loba dipaké dina parabot gudang otomatis kayaning gudang stereo mobil shuttle multi-lapisan, tipe rak bins AGV, RGV, sarta beban mini. Beurat maksimum kotak bahan anu dicekel ku HEGERLS tiasa ngahontal 50Kg. Lebar clamping tina panangan garpu bisa disaluyukeun wenang dina rentang 200 ~ 600mm. Perjalanan picking maksimum nyaéta 840mm. Laju operasi maksimum garpu teleskopik nyaéta 1.5m / s, sareng akselerasina nyaéta 1.2m / s ². Noise operasi dikontrol dina 75dB, anu tiasa nyumponan sarat tina rak ekstensi tunggal sareng ganda. HEGERLS ogé tiasa nyaluyukeun gudang stereoskopik mobil shuttle multi-lapisan tina kotak garpu teleskopik anu nyepengan numutkeun sarat khusus para nasabah, sapertos lebar cengkraman, picking stroke sareng parameter sanésna.
Bagian dina Hiygris HEGERLS gripped telescopic garpu kotak multi-lapisan shuttle mobil stereo gudang Garpu telescopic mangrupakeun mékanisme telescopic dipaké dina gudang stereo jeung logistik sistem gudang otomatis pikeun neundeun bahan atawa mindahkeun. Éta ngagaduhan fungsi ékspansi otomatis dua arah anu fleksibel sareng fungsi wates anu akurat! Ieu bisa langsung dipasang dina stacker nu, atawa dipasang dina mékanisme ngangkat tetep, atawa dipasang dina platform ngangkat mobile. The stacker ngalir ngaliwatan roadway antara rak pikeun otomatis ngakses atawa mindahkeun barang! Éta tiasa dihubungkeun sareng sistem garis produksi sareng sistem manajemen perusahaan. Éta ngagunakeun téknologi komputer sareng barkod (enkoder) pikeun ngawujudkeun manajemén sareng operasi anu cerdas!

Ngeunaan HEGERLS Clamping Telescopic garpu
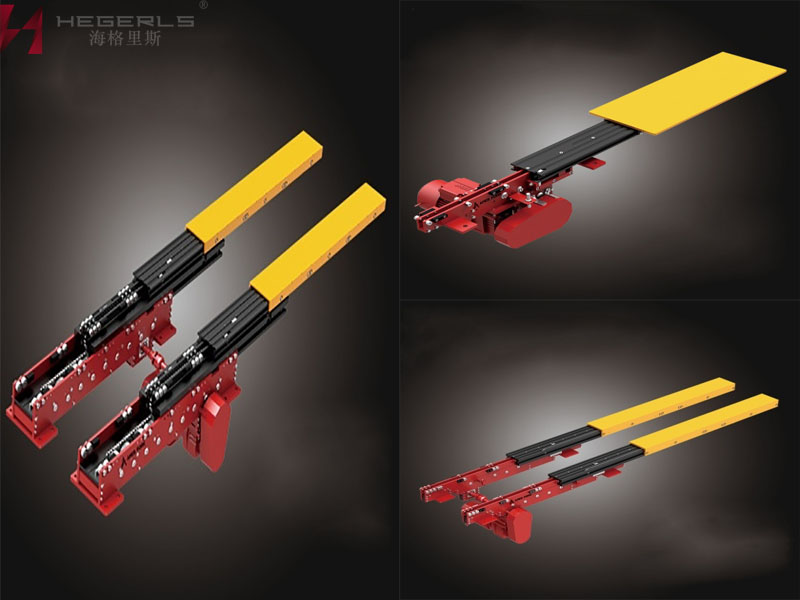
Garpu gripper teleskopik HEGERLS mangrupikeun jinis garpu anu unik dina séri garpu teleskopik stackers, nyaéta, garpu gripper teleskopik otomatis dua arah, ogé katelah garpu gripper nyekel atanapi garpu gripper, garpu garpu atanapi garpu garpu. . Ieu garpu husus dipaké pikeun mindahkeun bins leutik. Ieu bisa langsung dirakit dina multi-tingkat picking AGV atawa platform gawé séjén, jeung perluasan panangan garpu jeung clutch of uas (hook), Ngalengkepan aksés atawa mindahkeun aksi!
The HEGERLS gripper garpu lolobana dijieunna tina alloy aluminium, featuring ukuran leutik, beurat hampang, speed ngajalankeun gancang sarta ékspansi lemes. Dina waktos anu sami, éta ogé nganut prinsip sinkronisasi multi motor, sadar yén mékanisme garpu teleskopik anu sami tiasa dianggo pikeun mindahkeun atanapi ngaksés kotak tina spésifikasi anu béda. Henteu ngan ukur sacara efektif ningkatkeun efisiensi panyimpen, tapi ogé ningkatkeun tingkat pamanfaatan rohangan pikeun neundeun, khususna pikeun gudang Intelligent anu intensif!
Klip HEGERLS dina struktur garpu teleskopik
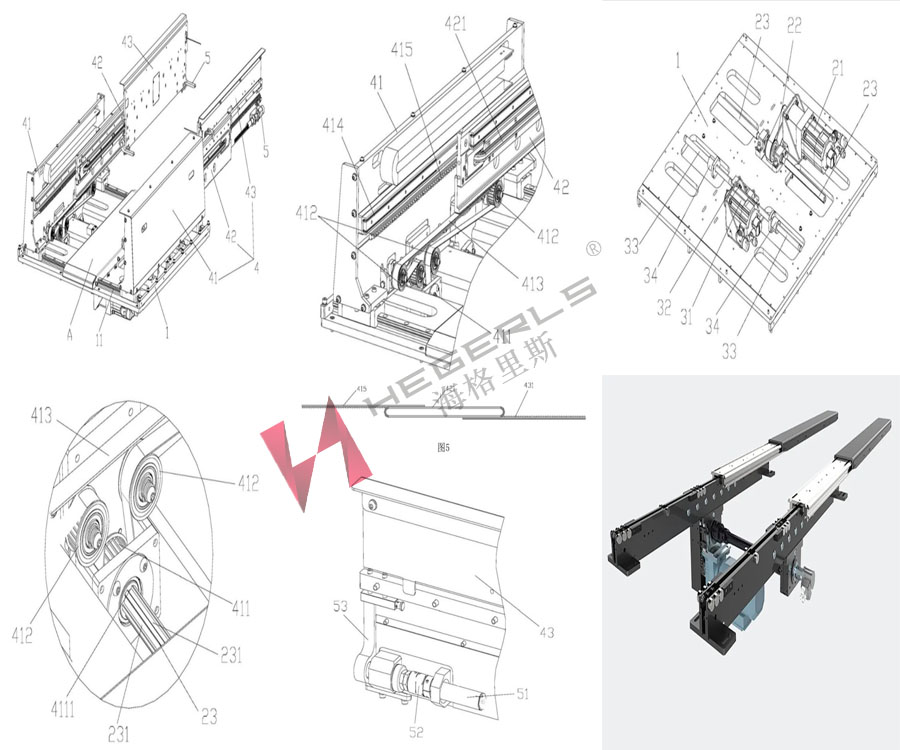
Struktur HEGERLS gripper garpu bisa dibagi kana lokasi gudang jero tur lokasi gudang deet. Lokasi panyimpen anu jero nyaéta lokasi neundeun sareng dua kotak bahan, sareng lokasi panyimpen anu deet mangrupikeun lokasi neundeun sareng hiji kotak bahan. Hartina, lokasi gudang jero bisa clamp dua kotak bahan dina hiji waktu, bari lokasi gudang deet ngan bisa clamp hiji kotak bahan dina hiji waktu. Beda antara garpu gripper HEGERLS sareng garpu teleskopik duplex biasa nyaéta garpu tarik ramo masih diwangun ku tilu awak garpu, nyaéta, awak garpu jero, awak garpu tengah sareng awak garpu luar, kecuali awak garpu hareup. boga hiji deui rod tarikan (hook), nu loyog jeung pituduh rail (slide rail), roller bar, kabayang sinkron, sabuk sinkron, bar béntés, shift rod (hook), jacking shaft, roda bar, drive motor (servo) , shift rod motor Alat deteksi sareng komponenana séjén ngabentuk mékanisme telescopic lengkep, nu cooperates jeung panangan garpu telescopic jeung clutch of uas (hook) pikeun ngalengkepan aksés atawa mindahkeun aksi!
Prinsip kerja klip HEGERLS dina garpu teleskopik
Panangan garpu tina garpu gripper HEGERLS nangtung di sisi sareng dihubungkeun sacara gurat ku rel pituduh. Ngaliwatan kontrol, rel pituduh bisa geser deui mudik pikeun nyaluyukeun jarak antara dua leungeun garpu tina garpu, ku kituna pikeun ngahontal pamakéan umum garpu pikeun kotak bahan multi spésifikasi! Nalika nyokot bahan, garpu ngalegaan ka posisi neundeun bahan, hook panahan (tuas) otomatis nurunkeun sareng ngahalangan tungtung tungtung karton atanapi kotak plastik, teras garpu mundur, nyered karton atanapi kotak plastik ka tengah. garpu, lajeng pindah kaluar sabalikna nurutkeun sarat gelar, hook nu (tuas) ditarik deui, sarta garpu retracts deui pikeun ngalengkepan tugas nyokot atawa mindahkeun! Sanaos prinsip garpu gripper sami sareng garpu teleskopik biasa, bagian transmisi, batang nyambungkeun sareng komponén sanésna garpu ramo béda pisan. Hal ieu dipaké pikeun ngajelaskeun yén kabayang ranté, ranté, gear, rak, jeung saterusna. atawa bahan alloy aluminium, jadi beurat garpu gripper téh ngan ngeunaan 80kg.
Salaku tambahan, éta kedah diperhatoskeun yén nalika ngarancang garpu teleskopik jinis gripper, ukuran rak panyimpen padet, posisi nangtung rak kalayan kotak, tingkat lagu sareng ukuran kotak kedah digabungkeun pikeun nangtukeun parameter sakabéh forks extension (gerakan garpu extension, spasi kotak, rubak garpu, rubak internal garpu, jangkungna garpu, jsb), ku kituna pikeun minuhan kaperluan peti dina rak. Garpu clamping ngan ukur tiasa nransferkeun atanapi ngaksés produk anu dibungkus dina kardus atanapi kotak plastik sacara efektif, sareng henteu tiasa mindahkeun bahan anu henteu teratur. Salaku tambahan, volume sareng beurat kotak bahan anu ditransfer henteu kedah ageung teuing, sareng beurat beban henteu kedah langkung ti 100KG! Jangkungna garpu clamping umumna dirancang nurutkeun jangkungna bin!
Ngeunaan HEGERLS Clip on Shuttle
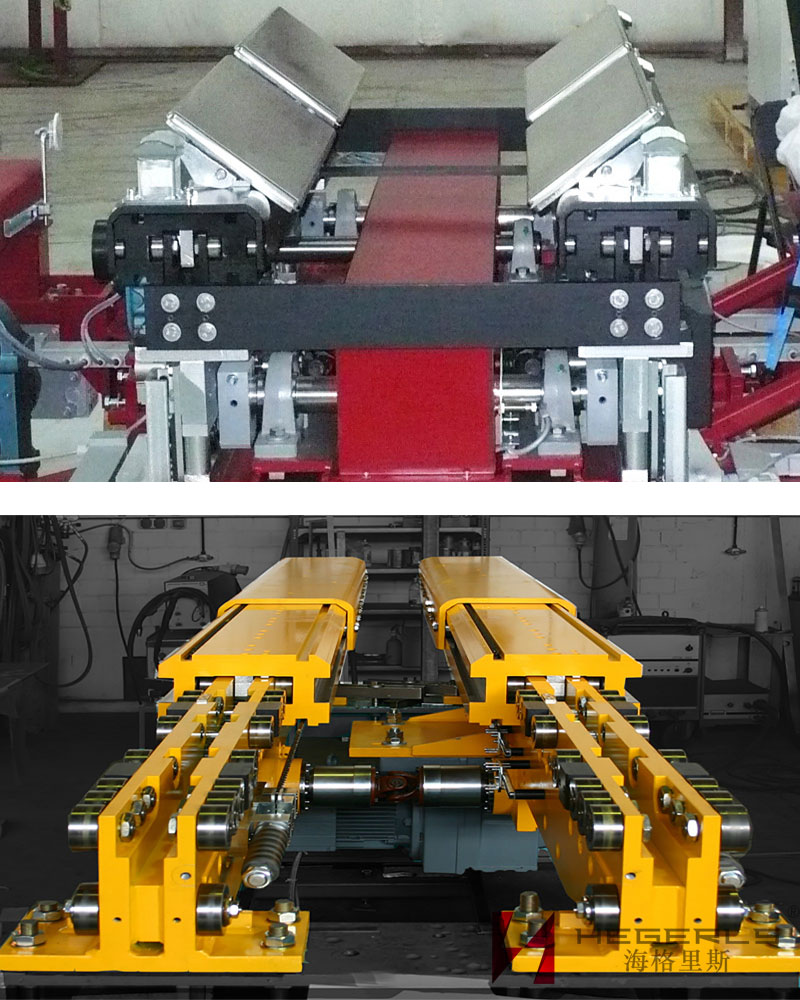
Struktur klip HEGERLS on shuttle diwangun ku pigura shuttle, chassis shuttle, mékanisme iinditan, mékanisme extension garpu sekundér, kolektor, plat bearing jeung platform bearing. Strukturna nyaéta kieu:
Sagala pigura shuttle biasana rongga katutup diwangun ku kurung awak utama dina dua sisi, cangkang jeung bracket hub jero, tur masing-masing disusun dina duanana tungtung chassis shuttle; cangkang geus disadiakeun kalawan panutup luhur nu bisa dibuka jeung ditutup ngaliwatan hinge panto turnover; Rak kawat panel disusun luhureun bracket hub; Mékanisme iinditan ngandung roda nyetir, roda pasip, motor tanpa sikat DC, réduksi sareng aci panyambung; Kadua sisi pigura shuttle dina hiji tungtung chassis shuttle disadiakeun kalawan roda nyetir disambungkeun ku nyambungkeun shafts, sarta kadua sisi pigura shuttle dina tungtung séjén tina chassis shuttle disadiakeun kalawan roda pasip disambungkeun ku shafts nyambungkeun; DC brushless motor cooperates jeung reducer pikeun ngajalankeun kabayang nyetir jeung ngajalankeun kabayang pasip; Aci panyambungna disayogikeun ku encoder magnét, dimana posisi awal sareng eureun tina shuttle dina jalur lempeng dicandak; Mékanisme penyuluhan garpu sekundér disusun sacara simetris dina sisi jero pigura mobil shuttle; The chassis shuttle antara mékanisme extension garpu sekundér disadiakeun kalawan platform bearing pikeun nempatkeun karinjang kargo; Rongga katutup pigura mobil shuttle masing-masing disayogikeun ku pelat bantalan, dimana pelat nyetir, pelat kontrol utama mékanisme perjalanan sareng pelat kontrol utama mékanisme penyambungan garpu disusun sacara berturut-turut; Piring nyetir drive mékanisme iinditan pikeun ngajalankeun shuttle pikeun ngajalankeun dina jalur lempeng. Dewan kontrol utama mékanisme iinditan ngadalikeun parameter ngajalankeun tur mimitian eureun posisi shuttle, sarta dewan kontrol utama mékanisme extension garpu ngadalikeun mékanisme extension garpu sekundér pikeun grab tur nempatkeun karinjang dina rak nu; Hiji alat ngumpulkeun diatur antara mobil shuttle jeung jalur lempeng, nu disambungkeun jeung kawat electrified disusun di jero jalur lempeng tur dipaké pikeun suplai kakuatan pikeun mobil shuttle. Fitur struktural klip dina mobil shuttle calakan pikeun neundeun ogé perenahna di nu alur diatur dina posisi mana kabayang nyetir na kabayang pasip mungguh ngahubungan aci nyambungkeun, sarta cingcin retainer elastis diatur dina alur pikeun ngabentuk axial. positioning tina kabayang nyetir na kabayang pasip. Roda pituduh ganda masing-masing diatur di sisi chassis shuttle handapeun kabayang nyetir na kabayang pasip, sarta antara lagu lempeng jeung chassis shuttle. Roda pituduh ganda ngabentuk wates kénca jeung katuhu nalika kabayang nyetir jeung kabayang pasip ngajalankeun dina jalur lempeng. Mékanisme penyambungan garpu sekundér ngawengku: pelat push extension fork tingkat kahiji, plat extension fork tingkat kadua, mékanisme katrol sinkron tingkat kadua, mékanisme drive extension fork tingkat kadua, motor drive extension fork, reducer sejen, jeung drive shaft. ; Sisi luar bracket hub pigura mobil shuttle disadiakeun ku tahap kahiji garpu extension push plat; A chute U ngawangun ieu disusun di tengah tahap kahiji garpu ngadorong plat, sarta sababaraha U ngawangun chute pulleys disusun dina interval nu sarua dina chute U ngawangun; A piring garpu sekundér disusun di luar parasut U ngawangun; Plat garpu sekundér disambungkeun jeung sababaraha pulleys alur U ngawangun ngaliwatan bolts jeung kacang; Tungtung luhur pelat ekstensi garpu tahap kadua masing-masing disayogikeun ku garpu shift, motor pangurangan planet DC sareng sénsor fotoéléktrik ti luar ka jero; Sensor photoelectric dipaké pikeun ménta sinyal posisi garpu sarta ngirimkeunana ka dewan kontrol utama mékanisme extension garpu, nu ngatur DC motor reducer planét pikeun ngajalankeun garpu pindah horisontal atawa vertikal; Mékanisme katrol sinkron sekundér masing-masing disusun dina piring ngadorong garpu primér sareng langsung di handap sareng luhureun parasut U ngawangun; Mékanisme katrol sinkron sekundér disambungkeun jeung plat pencét sabuk sinkron dina pelat extension garpu sekundér; Motor garpu extension drive jeung reducer sejen ngajalankeun mékanisme drive extension garpu sekundér pindah, jeung drive mékanisme drive extension garpu sekundér di sisi séjén pikeun mindahkeun ngaliwatan aci drive, jadi nu primér garpu extension push plat ngalir jeung drive sekundér. mékanisme katrol sinkron pikeun mindahkeun, sahingga nyetir pelat extension garpu sekundér pikeun mindahkeun. Mékanisme transmisi extension garpu dua-tahap ngawengku hiji encoder magnét, a katrol beubeur sinkron I, a beubeur sinkron I, a alat tensioning roda na rak a; A timing belt katrol 1 jeung timing belt 1 disusun handap tahap kahiji garpu ngadorong plat; Hiji sisi katrol sabuk sinkron I disambungkeun jeung aci transmisi, sarta sisi séjén disambungkeun jeung aci kaluaran tina reducer séjén ngaliwatan keyway nu. Alat kabayang Tensioner masing-masing disetél dina dua sisi reducer séjén pikeun fiksasi bantu tina katrol sabuk sinkron I jeung sabuk sinkron I; A rak disusun antara tahap kahiji garpu ngadorong piring jeung sabuk sinkron; Garpu extension drive motor jeung reducer sejen ngajalankeun sinkron sabuk katrol I jeung sabuk sinkron I muterkeun, jeung ngajalankeun sinkron sabuk katrol II jeung sabuk sinkron II dina sisi séjén pikeun muterkeun ngaliwatan aci transmisi. Dina waktos anu sami, rak dina dua sisi ngajalankeun pelat push extension garpu primér anu cocog pikeun ngahontal extension garpu primér. Nalika mékanisme katrol sabuk sinkron sekundér ngalir synchronously sarta drive pelat extension garpu sekundér pikeun mindahkeun, katrol U ngawangun gulungan dina U ngawangun chute, Jieun pelat extension garpu sekundér sadar extension garpu sekundér. Alat kabayang tensioning ngawengku: baud, nyaluyukeun bracket, nut ganda na kabayang tensioning; A kabayang tensioning diatur handap sabuk sinkron I na dina dua sisi tina reducer séjén, sarta geus dibereskeun dina bracket awak utama ngaliwatan nut ganda; Hiji bracket nyaluyukeun diatur dina nut ganda ngaliwatan baud, sarta posisi bracket nyaluyukeun disaluyukeun ku baud, ku kituna bracket nyaluyukeun drive nut ganda pindah ka luhur jeung ka handap, ku kituna sabuk sinkron I bisa ngajaga. kaayaan tegangan dina aksi tina kabayang tensioning.
Kumaha kauntungan perusahaan beus shuttle HEGERLS?
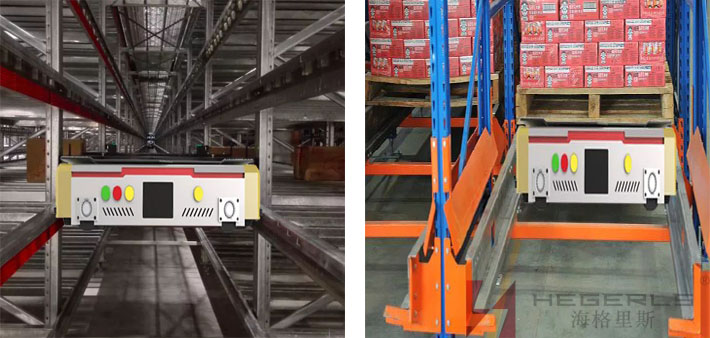
Kahiji, mékanisme iinditan, mékanisme extension garpu jeung pigura, garis kontak ngageser sarta alat pangumpulan kakuatan tina HEGERLS mobil shuttle calakan kalawan klip on gudang anu alesan diatur, nu ngajadikeun pinuh pamakéan spasi tina mobil shuttle, sarta bisa adaptasi jeung neundeun otomatis tur dimeunangkeun barang tina spésifikasi béda jeung lokasi di gudang tilu diménsi, ngembangna cakupan aplikasi tina mobil shuttle, sarta gancang tur éféktif ngalengkepan runtuyan lampah kontinyu tina mobil shuttle, kayaning leumpang, extension garpu, picking. up na nempatkeun barang, Ieu sadar gudang gancang jeung akurat barang, sahingga greatly ngaronjatkeun efisiensi operasi sarta tingkat téhnologi automation gudang otomatis, sarta ngurangan biaya investasi usaha. Dina waktos anu sami, éta sederhana sareng ringan dina struktur, réliabilitas anu luhur, sareng gampang dijaga. Bisa ngaganti stacker roadway tradisional, merealisasikan kalenturan tina sistem, sarta conforms kana trend ngembangkeun logistik e-commerce na automation gudang.
Kadua, dina mékanisme iinditan tina HEGERLS mobil shuttle calakan, anu shafts nyambungkeun tina roda nyetir na roda pasip disadiakeun kalawan alur, sarta bagian nyambungkeun tina bantalan disambungkeun ku tipe anyar cingcin retainer elastis, merealisasikan pangaruh positioning axial tina nyambungkeun. shafts; Ku ngagunakeun cingcin retainer elastis pikeun ngahontal éfék positioning axial, efisiensi produksi bisa ngaronjat sarta biaya bisa disimpen.
Katilu: Higelis HEGERLS mobil shuttle calakan pikeun nyekel gudang nyadar yén kabayang nyetir na kabayang pasip salawasna pindah dina jalur lempeng tanpa nyimpang tina lagu ngaliwatan struktur roda pituduh ganda. Struktur posisi ieu langkung stabil sareng dipercaya.
Kaopat, struktur extension garpu sekundér diadopsi ku HEGERLS mobil shuttle calakan bisa nyieun jarak extension garpu leuwih tebih tur meunangkeun deui baskets dina posisi béda; Dina waktos anu sami, prinsip mékanisme penyambungan garpu sekundér saderhana, sareng biaya desain sareng pabrikna rendah; Bagian transmisi adopts mode motor tunggal + reducer + transmisi aci sangkan mékanisme extension garpu sekundér ngahontal tujuan ékspansi sinkron jeung kontraksi, nu ngaheéat deui waragad, éféktif ngurangan spasi perenah diperlukeun, sarta ngurangan beurat mobil shuttle. .
Fifthly, Higelis HEGERLS mobil shuttle calakan adopts tipe anyar tina alat kabayang tensioning, nu bisa gancang ngajaga sabuk sinkron tensioned tur ngawujudkeun karya normal tina mobil shuttle. Leuwih ti éta, alat kabayang tensioning ieu basajan nyieun, merenah pikeun masang sarta bisa gancang disaluyukeun, nu ngaheéat ongkos, ngaheéat spasi tur ngaronjatkeun efisiensi gawé.
waktos pos: Dec-19-2022